简介
与Q Learning的比较
相比于之前学习的Q Learning,这个算法的不同点在于,可以不分析奖励值,直接从一个连续的动作空间中选择下一步要进行的动作,而Q Learning只能从有限多个动作中进行选择。
如何更新
Policy Gradients不使用反向传递误差来更新网络,而是使用环境给出的 reward 来进行反向传递,从而来决定是否增加这次选择的动作再次被选择的概率。
策略梯度如何下降
类比交叉熵
其中 $p(x)$ 为对应的标签,$q(x)$ 为输出的概率。
但在RL中是没有标签的。此时可以使用 reward 来充当标签。
假设一次状态行为序列为 $\gamma=\{s_1,a_1,r_1,s_2,…,s_t,a_t\}$ ,其中 $s_t$ 表示 t 时刻时的状态,$a_t$ 代表位于 $s_t$ 时采取的动作。这样的动作策略,使得我们得到了 reward $R(\gamma)$ 。接下来使用下面的式子进行计算:
其中 $\pi_\theta(\gamma)$ 表示了采取策略 $\gamma$ 的发生概率,N 为采样 $\gamma$ 的数目。
算法推导
算法中的策略梯度函数推导
将智能体的整个行为过程用数学表示如下:(表示成为一个动作和状态的序列)
我们要优化的目标为:
即为遵循上面的状态、动作轨迹,所能达到的最大环境奖励值的期望,此时求得的策略就是最佳策略
这里进行如下的定义:
其梯度如下:
此处用到了一个定理:
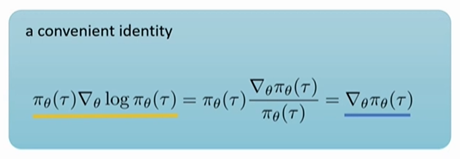
这样的话就得到了下面的算式:
接下来专注求解 $\nabla_\theta \log \pi_\theta(\tau)$ 。将 $\pi_\theta$ 转换如下:
在计算梯度时,由于第一项和最后一项均为常数(由环境本身决定),因此其梯度为0。最终将上式代入式 $(1)$ 可以得到:
对策略梯度进行评估
经过前面的推导,我们可以得到如下公式:
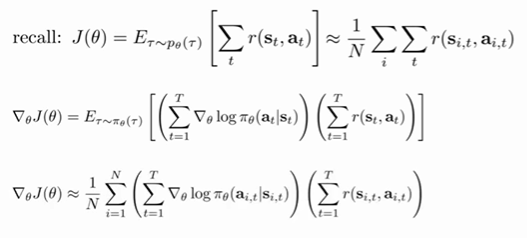
这就是策略梯度的计算公式。可以利用如下的式子来更新当前策略:
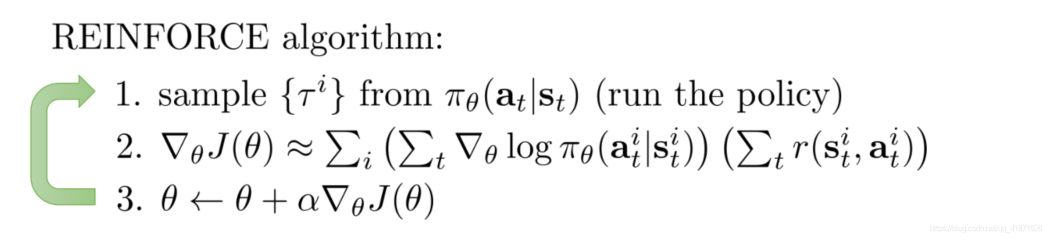
接下来就可以初步的得到一个算法:
如何进行收敛
极大似然估计中的策略梯度如下所示:
可以看到,极大似然的公式和policy gradient只相差一个reward和的乘积。这样的话,在求解策略梯度时,就可以用求极大似然的方法来进行求解。
再观察策略梯度的公式:
式子中的梯度表明了增加轨迹 $\tau $ 概率的方向,可以看到式子中的 $\pi_\theta(\tau_i)$ 与奖励值相乘,这就表明如果奖励值大时,对应的高奖励的轨迹就更有可能出现,反之低奖励值的轨迹出现的概率更小。
部分观测时的算法设计
只需要将式 $(2)$ 中的 $s_t$ 修改成为 $o_t$ 即可,因为环境本身会直接给出奖励值,与观测多少数据是无关的。
Policy Gradient的高方差问题
高方差问题
策略梯度方法有一个重要的缺陷就是方差会很高。这里用一个简单例子进行说明,如下图:
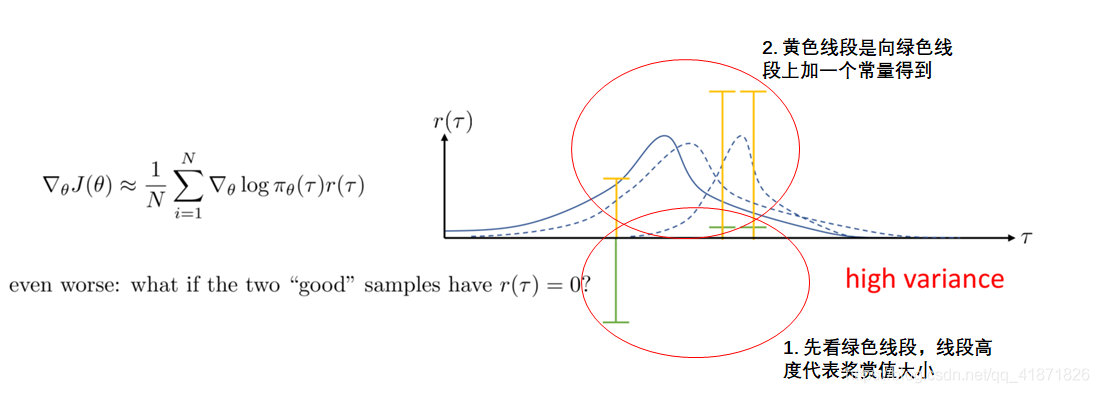
这里横坐标代表不同的采样样本,绿色线段是采样得到的智能体与环境交互后得到的奖赏值;第二步向第一步得到的奖赏值上加一个常量,该常量并不会影响策略梯度(下文也有相关推导)。但这两次得到的策略的概率分布结果却相差很多,这就是策略梯度方法高方差问题的直观体现,而高方差带来的问题就是算法更新的过程不稳定。
减小方差的方法
Causality假设
第一个是进行causality的假设:未来时刻的策略并不能影响之前时刻的奖赏值。
对原有的策略梯度公式中的奖赏值部分进行修改,原先的公式中后两项是先求和再相乘,如下:
修改之后的公式如下所示:只考虑从当前策略的时间往后推移的奖赏值,而不考虑之前的
加入Baseline
第二种方法在奖赏值的基础上减去一个常数(均值),这个常数叫作baseline,公式化表示就是:
最简单的情况下取值为:
那么如何选择最优的baseline来最小化策略梯度本身的方差呢
方差计算公式:$Var[x] = E[x^2]-(E[x])^2$
将策略梯度的公式代入得到:

如果要使其最小,可以通过对其求导数并令其导数为0,从而求得最优的baseline的表达式,这里为了简化推导,令 $g(\tau)=\nabla_\theta\log p_\theta$

从而得到:
Policy Gradient方法的实现技巧
这里其实应当自己总结一下,不过先把课程中老师提到的技巧记录一下:
总体上只需要给出损失函数即可,剩下的任务交给tf或者pytorch去做
其他要点:
- 使用较大的batch size对参数进行更新
- 手动调整learning_rates很困难,可以使用ADAM优化器
Off-policy Policy Gradient
其实policy gradient的方法的高方差问题起源于该算法是on-policy的算法,由于每次采样必须使用新的策略,所以每次采样的数据在一次梯度上升之后就被扔掉了。
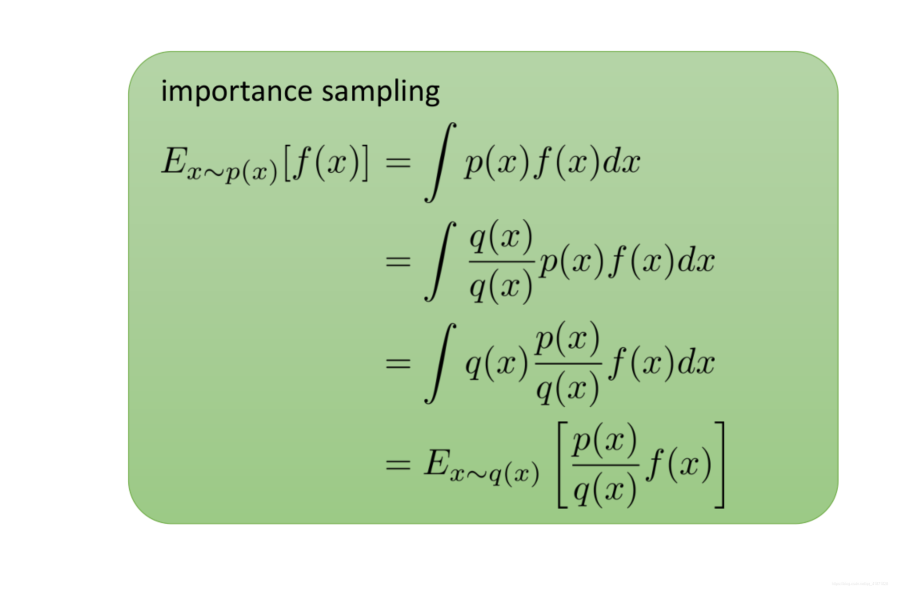
有一种解决方法是使用 importance sampling: