非线性规划
实例与定义
本来打算省出写博客的时间多看几页书……然而不写博客效率扑街,所以我又回来辽
非线性规划的定义在上一章中已经提到过,不重复了
与线性规划的区别
如果线性规划的优解存在,其优解只能在其可行域的边界上达到(特别是可行域的顶点上达到);而非线性规划的优解(如果优解存在)则可能在其可行域的任意一点达到。
matlab解法
Matlab中非线性规划的数学模型写成以下形式
其中f(x)是标量函数,A,B,Aeq,Beq是相应维数的矩阵和向量,C(x) ,Ceq(x) 是非线性向量函数
求解非线性规划的基本迭代格式
对于线性函数来说,求出的最优解就是整个可行域上的全局最优解,但非线性规划则不然。
对于非线性函数,可以采用迭代法求其最优解。迭代法的基本思想是:从一个选定的初始点 $x^0\in R^n$ 出发,按照某一特定的迭代规律产生一个点列 $\{x^k\}$ ,使得当 $\{x^k\}$ 是有穷点时,其最后一个点是最优解;当 $\{x^k\}$ 是无穷点列时,它有极限点,并且其极限点是最优解。
设 $x^0\in R^n$ 是某迭代方法的第 k 轮迭代点, $x^{k+1}\in R^n$ 是第 k+1 轮迭代点,记
这里 $t_k\in R^1(步长),p^k\in R^n(第k轮搜索方向),||p^k||=1$ 式(1)就是求解非线性规划模型的基本迭代格式
求解的一般步骤如下:
- 选取初始点 x^0^ ,令 k = 0
- 构造搜索方向,按照一定规则,构造 $f$ 在点 $x^k$ 处关于 $K$ 的可行下降方向(简介略)作为搜索方向 $p^k$
- 寻求搜索步长。以 $x^k$ 为起点沿搜索方向 $p^k$ 寻求适当的步长 $t_k$ ,使目标函数值有某种意义的下降
- 求出下一个迭代点,若 $x^{k+1}$ 已满足某种终止条件,则停止迭代
- 以 $x^{k+1}$ 代替 $x^k$ ,回到第二步
好了,重新写了一遍终于把这个步骤看懂了
这里的步骤里提到了,在构造搜索方向和搜索步长时要按照一定规律,接下来就学习如何构造
无约束问题
一维搜索方法
即沿某一已知方向求目标函数的极小点。常用的有:
- 试探法(斐波那契法,0.618法)
- 插值法(抛物线插值法,三次插值法)
- 微积分中的求根法(切线法,二分法)
假设我们考虑一维极小化问题
若 $f(t)$ 是 $[a,b]$ 区间上的下单峰函数,我们可以通过不断地缩短 $[a,b]$ 的长度来搜索近似最优解 $t^*$
在 $[a,b]$ 中任取两个关于区间对称的点 $ t_1,t_2(t_2<t_1)$ 叫做搜索点,计算 $f(t_1)、f(t_2)$ 并比较其大小。
对于单峰函数:
若 $f(t_2)<f(t_1)$,则 $t^*\in [a,t_1]$ ,因而 $[a,t_1]$ 是缩短了的单峰区间
若 $f(t_2)>f(t_1)$,则 $t^*\in [t_2,b]$ ,因而 $[t_2,b]$ 是缩短了的单峰区间
若 $f(t_2)=f(t_1)$,则$[a,t_1]$ $[t_2,b]$ 都是缩短了的单峰区间
下面是一些个选取探索点的规则
Fibonacci法
使用对称搜索的方法,逐步缩短所考察的区间,能以尽量少的函数求值次数,达到预定的某一缩短率
步骤如下
选取初始数据,确定单峰区间 $[a_0,b_0]$ ,给出搜索精度 $ \delta>0 $ ,由公式
确定搜索次数 n
$k=1,a=a_0,b=b_0$ ,由公式
计算 $t_1和t_2$
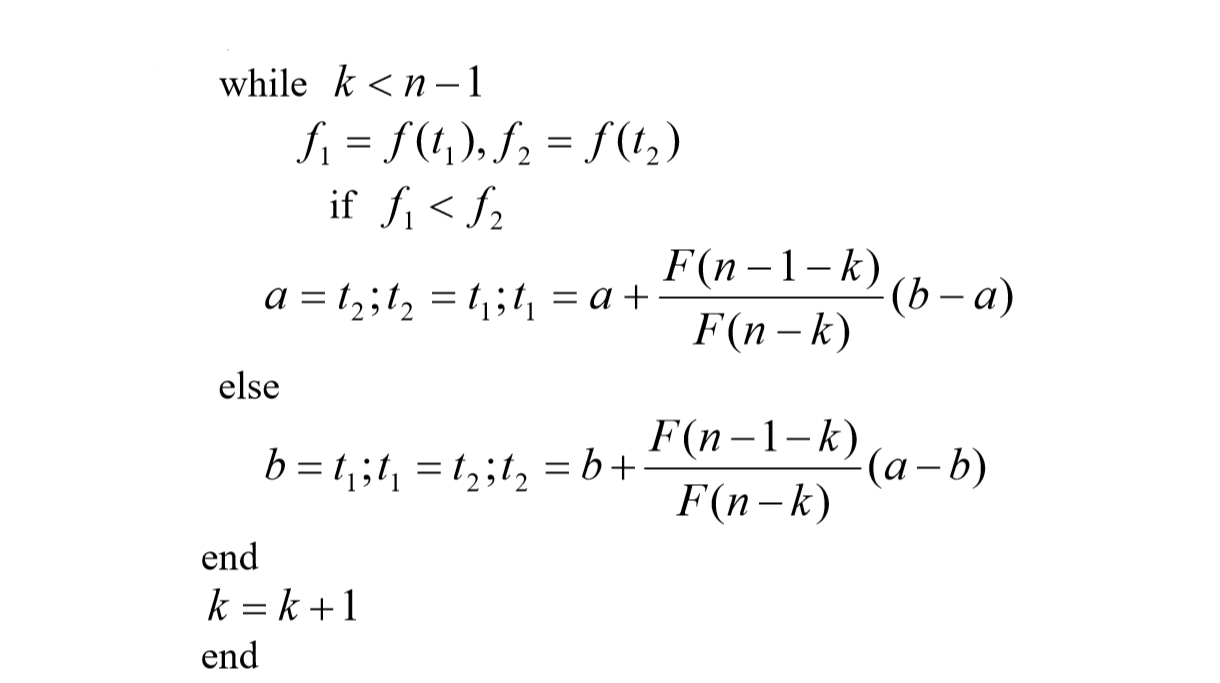
当进行至 t_1=$k=n-1$ 时,$t_1=t_2=\frac{1}{2}(a+b)$ ,这就无法再进行比较了。因此,取
其中 $ \varepsilon $ 为任意小的数,在 $t_1 t_2$ 这两点中,以函数值较小者为近似极小点,相应的函数值为近似极小值,并得最终区间 $[a,t_1]$ 或 $[t_2,b]$ 。
0.618法
黄金分割数 $\omega$ 和 $Fibonacci$ 分数之间有着重要的关系
现用不变的区间缩短率 0.618,代替斐波那契法每次不同的缩短率,就得到了黄金分割法(0.618 法)。这个方法可以看成是斐波那契法的近似,实现起来比较容易,效果也相当好,因而易于为人们所接受
0.618 法是一种等速对称进行试探的方法,每次的探索点均取在区间长度的 0.618 倍和 0.382 倍处。
二次插值法
对极小化问题,当函数在这个区间上连续时,可以考虑用多项式插值来进行一维搜索。它的基本思想是:在搜索区间中,不断用低次(通常不超过三次)多项式来近似目标函数,并逐步用插值多项式的极小点来逼近最优解。